 平台热线
平台热线





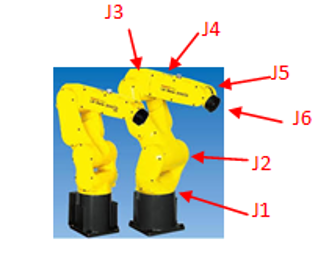
机器人惯性与有效载荷
版权归原作者,侵删。
机器人有效载荷:
有效载荷是机器人可以举起的重量。有效载荷包括臂端工具(EOAT)的重量和所拣选产品的重量。有效载荷更易于测量和计算。
机器人惯性:
惯性是物体抵抗速度(速度和/或方向)变化的物质特性。惯性是使用臂端工具和产品的质量,这些物品的重心以及从机器人面板到重心的距离来计算的。惯性需要多次测量,计算,并且不直观。
选择合适的机器人:
由于惯性的影响,仅选择额定载荷高于臂端工具和产品重量的机器人不足以使系统成功。机器人可能具有可接受的有效载荷,但机械臂末端和产品的惯性过高。这会降低机器人的速度,影响周期时间或导致机器人无法运行。
机器人也是人:
这是一个比较有效负载与机器人惯性的示例。
想象一下,握住一根重物位于中间/居中的杆。旋转它几乎不费力。现在,图像重物已从中心移到杆的末端,而重物相同时,旋转需要更多的力气。
使用短杆与长杆并在末端加重也可以看到这种效果。短杆靠近中心,因此更易于控制。较长的杆需要更多的精力。
机器人惯性的样本计算:
对于机器人特有的示例,我们将使用LR Mate 200id7L。该机器人的额定载荷为7千克(15.4磅)。EOAT将是一个重量为5千克(11磅)的0.1立方米(4英寸)立方体。

可接受的负载–基于机器人的惯性
将重物直接安装在机器人面板上时,重心为0.05 m,并且机器人上的惯性是机器人轴4到6所允许的值的10-15%。这是可接受的负载。
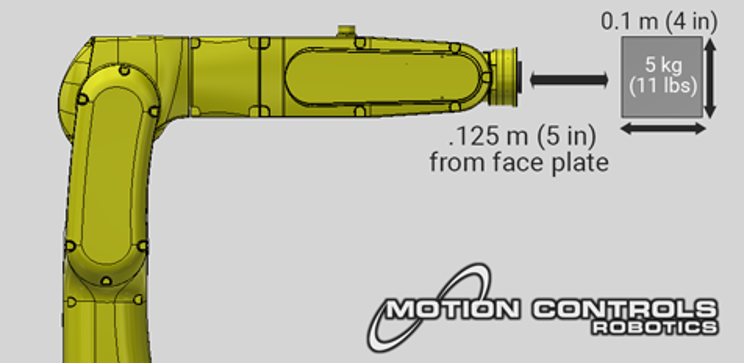
边界负荷–基于机器人惯性:
当重量安装在距机器人面板0.125 m(5 in)的位置时,重心为0.175 m,并且机器人上的惯性为机器人轴4到6上允许的大值的40-110%。界线,将需要集成商和FANUC逐案决定。
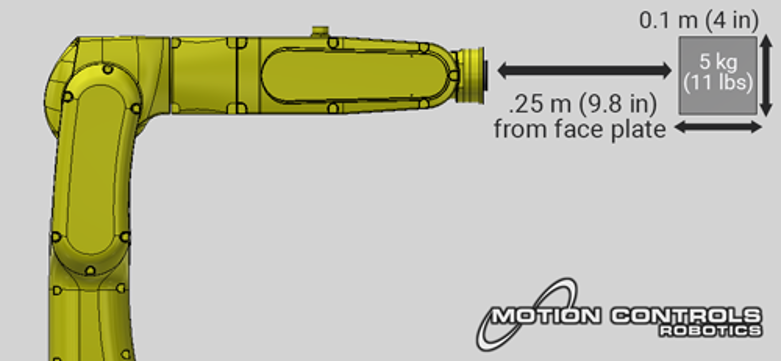
不可接受的负载-基于机器人的惯性:
当重量安装在距机器人面板0.25 m的位置时,重心为0.3 m,并且机器人上的惯性为机器人轴4到6所允许的*大值的110-310%。此负载是不可接受的。
在上面的示例中,有效载荷的重量相同,为5kg,但是由于增加了EOAT,当重量进一步远离机器人面板时,惯性急剧变化。该示例显示了臂端工具和产品的整体尺寸多么重要,仅看产品本身的重量还不够。
了解更多ABB机器人,RSP快换盘,请咨询:ABB机器人报警代码