 平台热线
平台热线





设置ABB机器人碰撞检测
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
工博士提供了FANUC,Yaskawa,ABB,Kawasaki和 KUKA等各种新型机器人 。我们相信,我们真正地在协助中国智能制造发展,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线或致电与我们联系 。
又到了一月一期的培训课堂时间啦!今天我们要学习的,是一个非常实用的功能哦~如何设置ABB机器人碰撞检测?快来坐好,准备上课吧!
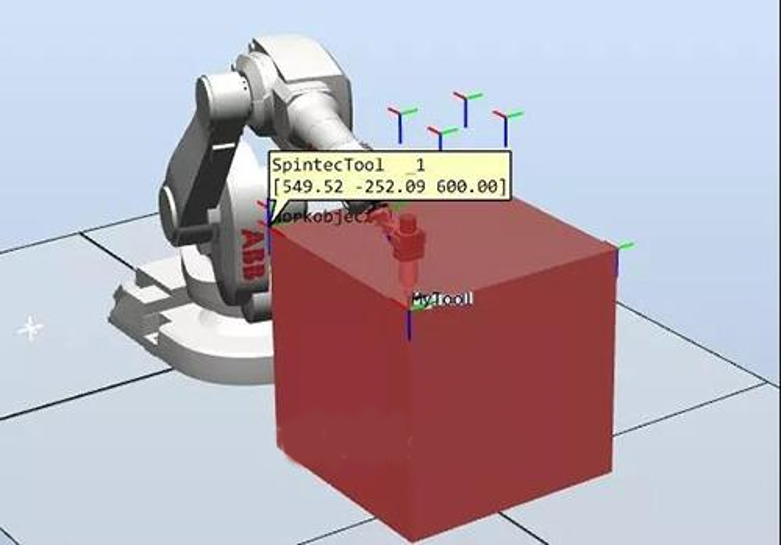
1)机器人做好轨迹后,可以通过碰撞检测来检查机器人工具是否和工件碰撞,如下图,机器人工具在该位置与工件相撞
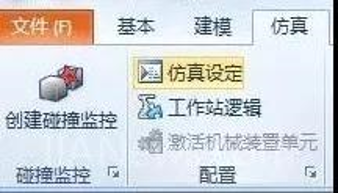
2)仿真-创建碰撞监控
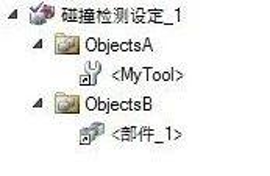
3)把要检测的两个对象拖入
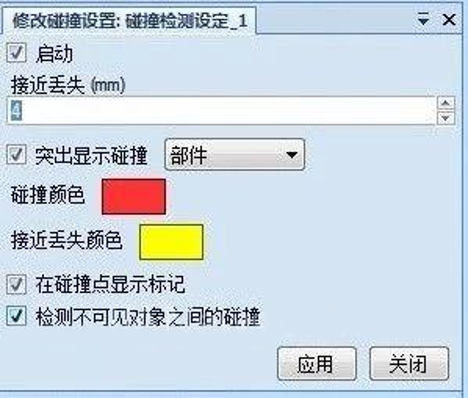
4)右击,设置
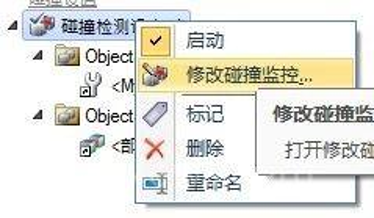
5)修改碰撞提示的颜色等。
6)有时候工具等也不能太接近工件,接近丢失即设置工具和工件在该范围内,报警
在此处联系我们或致电与我们联系,以获取有关机器人解决方案的快速简便的报价。
了解更多ABB机器人配件,RSP快换盘,请咨询:ABB机器人报警代码